Awọn ọja
JD-IMU-M11 IMU ẹyọ wiwọn inertial ti a ṣepọ pupọ
Ọja Awọn ẹya ara ẹrọ
Opin elo:O le lo si lilọ kiri ni idapo, eto itọkasi ihuwasi ati awọn aaye miiran.
Ayika aṣamubadọgba:gbigbọn ti o lagbara ati resistance mọnamọna, le pese iyara igun deede ati alaye isare ni -40°C ~ + 70°C.
Awọn aaye elo:
Ofurufu:drones, smati ado, rockets
Ilẹ:Awọn ọkọ ayọkẹlẹ ti ko ni eniyan, awọn roboti, ati bẹbẹ lọ

Ọja iṣẹ sile
| Ẹka Metiriki | Orukọ Metiriki | Metiriki išẹ | Awọn akiyesi |
| Gyroscope sile | iwọn iwọn | ± 1800°/s | |
| Asekale ifosiwewe repeatability | <300ppm | ||
| Ila ifosiwewe | <500ppm | ||
| Iduroṣinṣin abosi | <30°/h(1σ) | 10 Dan | |
| Aisedeede abosi | <8°/h(1σ) | Allan Curve | |
| Atunse abosi | <30°/h(1σ) | ||
| Bandiwidi (-3dB) | 200Hz | ||
| Accelerometer paramita | iwọn iwọn | ± 180g |
|
| Asekale ifosiwewe repeatability | <1000ppm |
| |
| Ila ifosiwewe | <3000ppm |
| |
| Iduroṣinṣin abosi | <5mg(1σ) |
| |
| Atunse abosi | <5mg(1σ) |
| |
| Bandiwidi | 200HZ |
| |
| Ni wiwoCharacteristics | |||
| Ni wiwo iru | RS-422 | Oṣuwọn Baud | 921600bps (aṣeṣe) |
| Oṣuwọn imudojuiwọn data | 200Hz (ṣe asefara) | ||
| AyikaAdaptability | |||
| Iwọn iwọn otutu ti nṣiṣẹ | -40°C~+70°C | ||
| Ibi ipamọ otutu ibiti o | -55°C~+85°C | ||
| Gbigbọn (g) | 6.06g (rms), 20Hz ~ 2000Hz | ||
| ItannaCharacteristics | |||
| Foliteji igbewọle (DC) | +5VDC | ||
| Ti araCharacteristics | |||
| Iwọn | 36mm * 23mm * 12mm | ||
| Iwọn | 20g | ||
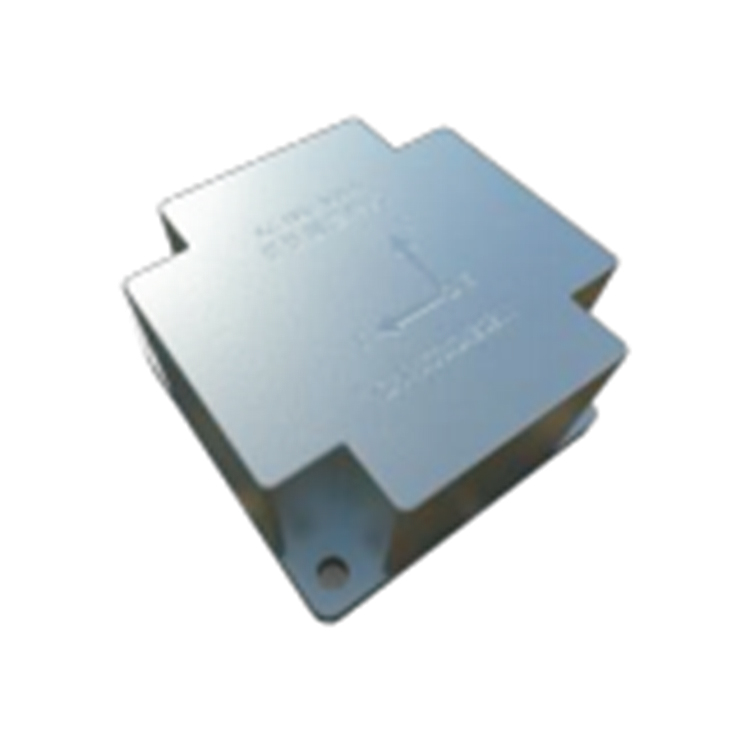
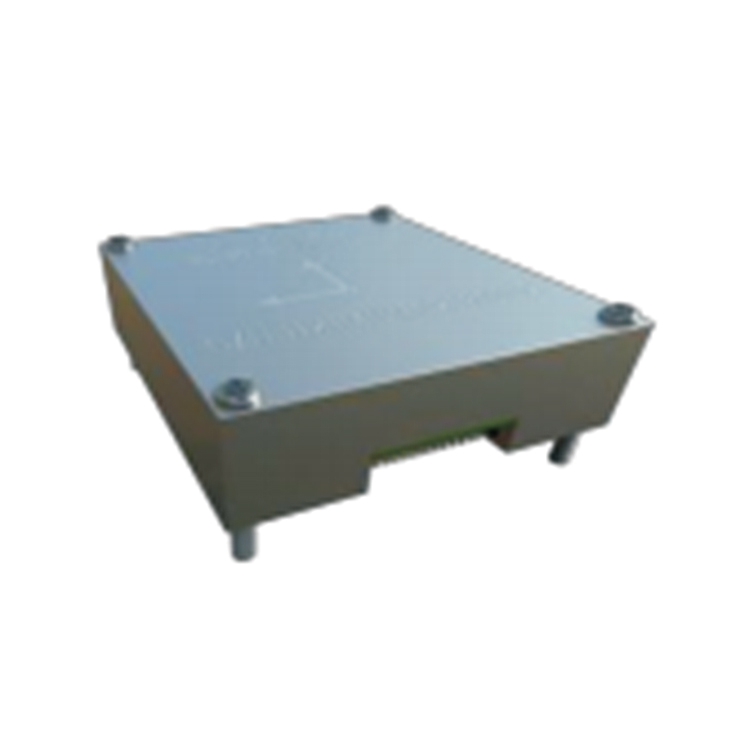
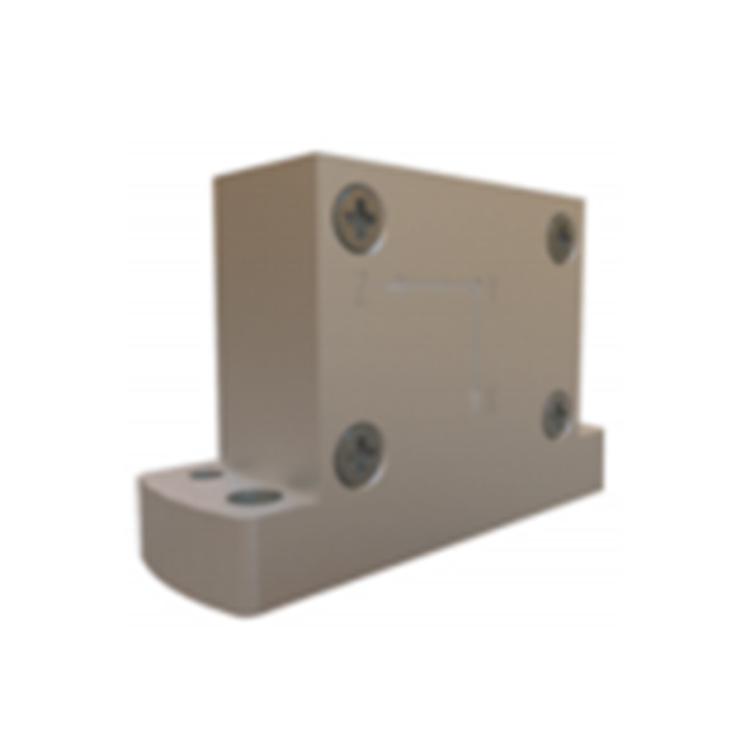
Ọja Ifihan
Ọkan ninu awọn ẹya pataki ti JD-IMU-M11 IMU ni iwọn kekere MEMS gyroscope ati accelerometer, eyiti o ṣiṣẹ papọ lati pese awọn wiwọn deede ti iyara angula ati isare laini nipa awọn aake mẹta.Ni afikun, IMU lo awọn algoridimu isanpada iwọn otutu iṣẹ-giga ati awọn algoridimu isọdi ẹrọ inertial lati rii daju pe awọn wiwọn deede ti wa ni itọju paapaa labẹ awọn ipo nija.
Pẹlu imọ-ẹrọ gige-eti rẹ, JD-IMU-M11 IMU nfunni ni ọpọlọpọ awọn anfani si olumulo.Ni akọkọ, iwọn kekere rẹ ati agbara kekere jẹ ki o jẹ aṣayan ti o wuyi fun awọn ohun elo nibiti aaye ati agbara wa ni ere kan.Ẹrọ naa tun jẹ iwuwo fẹẹrẹ pupọ, ti n ṣe afihan iṣipopada rẹ ati irọrun ti lilo.
Ni awọn ofin ti igbẹkẹle, JD-IMU-M11 IMU tayọ.Akoko ibẹrẹ kukuru rẹ tumọ si pe o le ṣetan ni awọn iṣẹju, ti o jẹ ki o jẹ ohun-ini fun ẹnikẹni ti o n wa lati dinku akoko isinmi.Ni afikun, iṣedede giga rẹ ṣe idaniloju pe awọn wiwọn nigbagbogbo jẹ deede, ti o jẹ ki o jẹ apẹrẹ fun awọn ohun elo to ṣe pataki gẹgẹbi afẹfẹ ati aabo.
Iwoye, JD-IMU-M11 IMU jẹ ohun elo ti o lagbara ati ti o wapọ, apẹrẹ fun ẹnikẹni ti o n wa lati mu awọn iwọn wọn si ipele ti o tẹle.Boya o fẹ mu awọn iwọn ni afẹfẹ tabi lori ilẹ, JD-IMU-M11 IMU jẹ ojutu pipe lati ṣe iranlọwọ fun ọ lati ṣe iṣẹ ti o tọ.
Pẹlu awọn alaye imọ-ẹrọ iwunilori rẹ, apẹrẹ didan ati wiwo ore-olumulo, o rọrun lati rii idi ti JD-IMU-M11 IMU n yarayara di yiyan akọkọ ti awọn alamọja nibi gbogbo.Boya o jẹ alamọdaju ti igba tabi o kan titẹ si aaye rẹ, ẹrọ tuntun yii jẹ daju lati kọja awọn ireti rẹ ati ṣe iranlọwọ fun ọ lati ṣaṣeyọri awọn ibi-afẹde rẹ.
- Iwọn ati Eto Le Ṣe Adani
- Awọn itọkasi Bo Gbogbo Ibiti lati Irẹlẹ si Giga
- Lalailopinpin Low Owo
- Akoko Ifijiṣẹ Kukuru ati Idahun akoko
- Iwadi Ifowosowopo Idawọlẹ Ile-iwe-Idawọpọ Dagbasoke Eto naa
- Ti ara Aifọwọyi Patch ati Laini Apejọ
- Ti ara Environmental Ipa yàrá